Jak se rotor otáčí?
Jakýkoli elektromotor je navržen tak, aby vykonával mechanickou práci kvůli spotřebě elektrické energie, která se na něj aplikuje, která se zpravidla přeměňuje na rotační pohyb. Ačkoli v technologii existují modely, které okamžitě vytvářejí translační pohyb pracovního těla. Říká se jim lineární motory.
V průmyslových instalacích pohánějí elektromotory různé stroje a mechanická zařízení zapojené do technologického výrobního procesu.
Uvnitř domácích spotřebičů fungují elektromotory v pračkách, vysavačích, počítačích, fénech, dětských hračkách, hodinkách a mnoha dalších zařízeních.
Za konstruktéra prvního elektromotoru je považován fyzik Peter Barlow, který v roce 1822 představil svůj vynález, později nazvaný Barlow Wheel. Toto řešení nebylo vhodné pro praktické použití, ale ukázalo, jak elektřina dokáže ovládat jednoduchý mechanismus.

Základní fyzikální procesy a princip činnosti
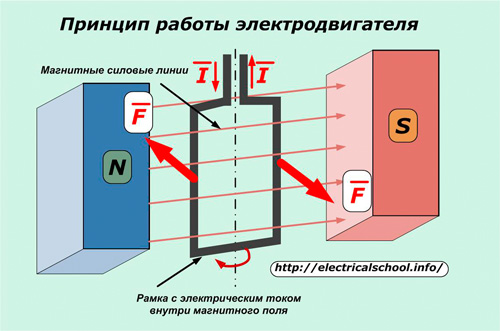
Na elektrické náboje pohybující se uvnitř magnetického pole, které se nazývají elektrický proud, působí vždy mechanická síla, která má tendenci vychylovat jejich směr v rovině umístěné kolmo na orientaci magnetických siločar. Když elektrický proud prochází kovovým vodičem nebo cívkou z něj vyrobenou, má tato síla tendenci pohybovat/otáčet každým vodičem s proudem a celým vinutím jako celkem.
Na obrázku níže je vidět kovový rám, kterým protéká proud. Magnetické pole aplikované na něj vytváří sílu F pro každou větev rámu, čímž vzniká rotační pohyb.
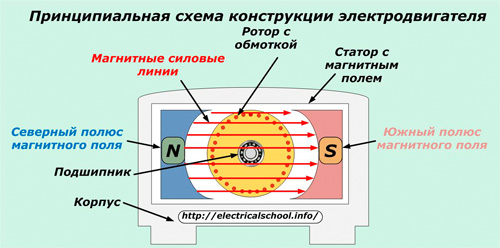
Tato vlastnost interakce elektrické a magnetické energie založená na vytváření elektromotorické síly v uzavřeném vodivém obvodu se podílí na chodu každého elektromotoru. Jeho design zahrnuje:
- vinutí, kterým protéká elektrický proud. Je umístěn na speciálním kotevním jádru a zajištěn v rotačních ložiskách, aby se snížilo působení třecích sil. Tato struktura se nazývá rotor;
- stator, který vytváří magnetické pole, které svými siločárami proniká elektrickými náboji procházejícími závity vinutí rotoru;
- pouzdro pro uložení statoru. Uvnitř skříně jsou vyrobeny speciální montážní objímky, uvnitř kterých jsou namontovány vnější kroužky ložisek rotoru.
Zjednodušenou konstrukci nejjednoduššího elektromotoru lze znázornit na následujícím obrázku.
Při otáčení rotoru vzniká točivý moment, jehož výkon závisí na obecné konstrukci zařízení, množství aplikované elektrické energie a jejích ztrátách při transformacích.
Maximální možný točivý moment motoru je vždy menší než elektrická energie, která je na něj aplikována. Je charakterizována velikostí faktoru účinnosti.
Podle typu proudu procházejícího vinutím se dělí na stejnosměrné nebo střídavé motory. Každá z těchto dvou skupin má velké množství úprav pomocí různých technologických postupů.
Jejich statorové magnetické pole je vytvářeno trvale namontovanými permanentními magnety nebo speciálními elektromagnety s budícím vinutím. Vinutí kotvy je pevně uloženo v hřídeli, která je uložena v ložiskách a může se volně otáčet kolem vlastní osy.
Základní struktura takového motoru je znázorněna na obrázku.
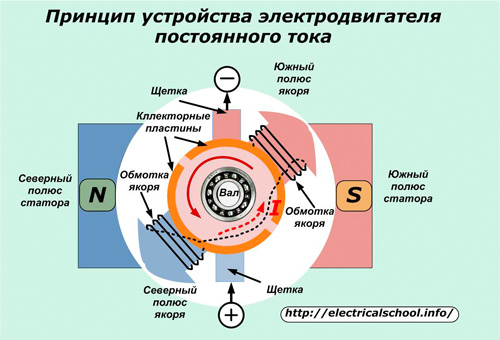
Na jádru kotvy z feromagnetických materiálů je vinutí sestávající ze dvou sériově zapojených částí, které jsou jedním koncem spojeny s vodivými kolektorovými deskami a druhými jsou spojeny navzájem. Dva grafitové kartáče jsou umístěny na diametrálně protilehlých koncích kotvy a jsou přitlačeny ke kontaktním podložkám desek komutátoru.
Spodní kartáč vzoru je napájen kladným potenciálem zdroje konstantního proudu a horní kartáček je napájen záporným potenciálem. Směr proudu procházejícího vinutím je znázorněn tečkovanou červenou šipkou.
Proud způsobuje magnetické pole severního pólu v levé dolní části armatury a jižního pólu v pravém horním (gimletovo pravidlo). To vede k odpuzování pólů rotoru od podobných stacionárních pólů a přitahování k odlišným pólům na statoru. V důsledku působící síly dochází k rotačnímu pohybu, jehož směr je vyznačen hnědou šipkou.
Při dalším otáčení kotvy se setrvačností póly přesouvají k dalším kolektorovým deskám. Směr proudu v nich se mění na opačný. Rotor se dále otáčí.
Jednoduchá konstrukce takového kolektorového zařízení vede k velkým ztrátám elektrické energie. Takové motory pracují v zařízeních jednoduché konstrukce nebo v hračkách pro děti.
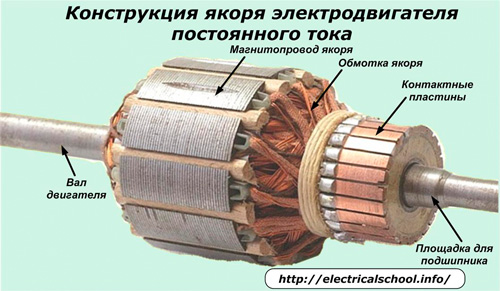
Stejnosměrné elektromotory zapojené do výrobního procesu mají složitější konstrukci:
- vinutí není rozděleno na dvě, ale na více částí;
- každá sekce vinutí je namontována na vlastním pólu;
- Sběrné zařízení je vyrobeno z určitého počtu kontaktních podložek podle počtu sekcí vinutí.
Výsledkem je hladké připojení každého pólu přes jeho kontaktní desky ke kartáčům a zdroji proudu a snižují se ztráty elektřiny.
Zařízení takové kotvy je znázorněno na obrázku.
U stejnosměrných elektromotorů lze směr otáčení rotoru obrátit. K tomu stačí obrátit pohyb proudu ve vinutí změnou polarity u zdroje.
Od předchozích konstrukcí se liší tím, že elektrický proud protékající jejich vinutím je popsán sinusovým harmonickým zákonem, periodicky měnícím svůj směr (znaménko). K jejich napájení je přiváděno napětí z generátorů se střídavým znamením.
Stator takových motorů je vyroben z magnetického obvodu. Je vyroben z feromagnetických desek s drážkami, do kterých jsou umístěny závity vinutí s rámovou (cívkovou) konfigurací.

Níže uvedený obrázek ukazuje princip činnosti jednofázového střídavého motoru se synchronním otáčením elektromagnetických polí rotoru a statoru.
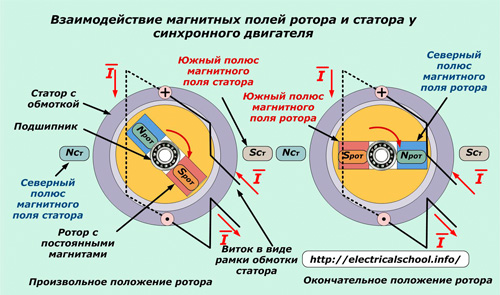
V drážkách magnetického obvodu statoru na diametrálně opačných koncích jsou vodiče vinutí, schematicky znázorněné ve formě rámu, kterým protéká střídavý proud.
Uvažujme případ pro časový okamžik odpovídající průchodu kladné části její půlvlny.
Rotor s vestavěným permanentním magnetem se volně otáčí v ložiskových drahách, které mají jasně definovaný severní „N ústí“ a jižní „S ústí“ pól. Když statorovým vinutím protéká kladná půlvlna proudu, vzniká v něm magnetické pole s póly „S st“ a „N st“.
Mezi magnetickými poli rotoru a statoru vznikají interakční síly (jako se póly odpuzují a opačné póly přitahují), které mají tendenci otáčet kotvu elektromotoru z libovolné polohy do konečné polohy, kdy jsou opačné póly umístěny co nejblíže. pokud možno vůči sobě navzájem.
Uvažujeme-li stejný případ, ale pro okamžik, kdy kostrovým vodičem protéká zpětná – záporná půlvlna proudu, dojde k otáčení kotvy v opačném směru.
Pro zajištění nepřetržitého pohybu rotoru není ve statoru vytvořen jeden rám vinutí, ale určitý počet, přičemž je třeba vzít v úvahu, že každý z nich je napájen samostatným zdrojem proudu.
Princip činnosti třífázového střídavého motoru se synchronním otáčením elektromagnetických polí rotoru a statoru je znázorněn na následujícím obrázku.
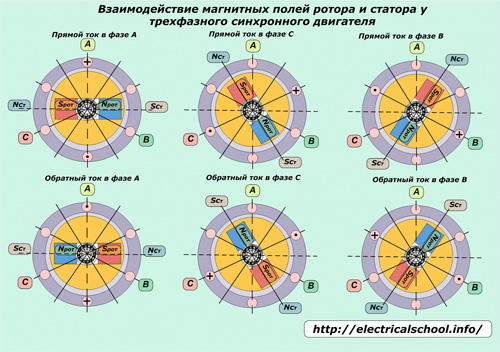
V tomto provedení jsou uvnitř magnetického obvodu statoru namontována tři vinutí A, B a C, vzájemně posunutá pod úhly 120 stupňů. Vinutí A je zvýrazněno žlutě, B zeleně a C červeně. Každé vinutí je vyrobeno se stejnými rámečky jako v předchozím případě.
Na obrázku pro každý případ prochází proud pouze jedním vinutím v dopředném nebo zpětném směru, což je znázorněno znaménky „+“ a „-“.
Když kladná půlvlna prochází fází A v dopředném směru, osa rotorového pole zaujme vodorovnou polohu, protože magnetické póly statoru jsou vytvořeny v této rovině a přitahují pohyblivou kotvu. Opačné póly rotoru mají tendenci se přibližovat k pólům statoru.
Když kladná půlvlna následuje po fázi C, kotva se otočí o 60 stupňů ve směru hodinových ručiček. Po přivedení proudu do fáze B dojde k podobné rotaci kotvy. Každý postupný tok proudu v další fázi dalšího vinutí otočí rotor.
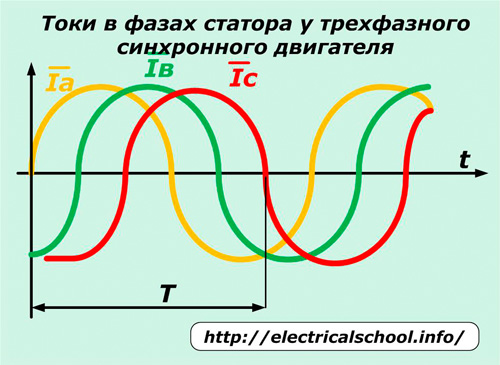
Pokud je do každého vinutí přivedeno třífázové síťové napětí posunuté pod úhlem 120 stupňů, pak v nich budou kolovat střídavé proudy, které roztáčí kotvu a vytvářejí její synchronní rotaci s přiváděným elektromagnetickým polem.
Stejná mechanická konstrukce byla úspěšně použita u třífázového krokového motoru. Pouze v každém vinutí jsou pomocí ovládání speciálního regulátoru (budiče krokového motoru) přiváděny a odváděny stejnosměrné impulsy podle výše popsaného algoritmu.
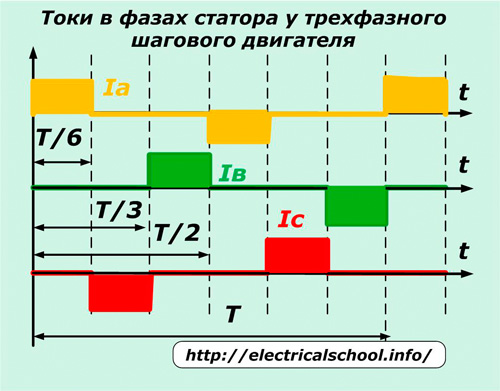
Jejich start zahájí rotační pohyb a zastavení v určitém okamžiku zajistí dávkované otáčení hřídele a zastaví se v naprogramovaném úhlu pro provedení určitých technologických operací.
U obou popsaných třífázových systémů je možné měnit směr otáčení kotvy. Chcete-li to provést, stačí změnit sled fází „A“ – „B“ – „C“ na něco jiného, například „A“ – „C“ – „B“.
Rychlost otáčení rotoru je regulována délkou periody T. Její snížení vede ke zrychlení otáčení. Velikost amplitudy proudu ve fázi závisí na vnitřním odporu vinutí a hodnotě napětí na něj aplikovaného. Určuje velikost točivého momentu a výkon elektromotoru.
Tyto konstrukce motorů mají stejný magnetický obvod statoru s vinutím jako u dříve diskutovaných jednofázových a třífázových modelů. Svůj název získaly díky nesynchronnímu otáčení elektromagnetických polí kotvy a statoru. Toho bylo dosaženo vylepšením konfigurace rotoru.
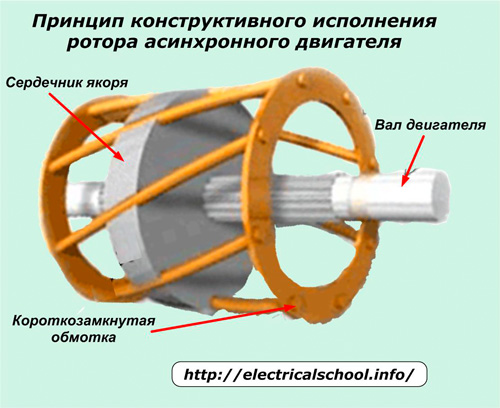
Jeho jádro je vyrobeno z elektrotechnických ocelových plechů s drážkami. Jsou vybaveny hliníkovými nebo měděnými proudovými vodiči, které jsou na koncích kotvy uzavřeny vodivými kroužky.
Při přivedení napětí na vinutí statoru se elektromotorickou silou indukuje elektrický proud ve vinutí rotoru a vzniká magnetické pole kotvy. Když se tato elektromagnetická pole vzájemně ovlivňují, hřídel motoru se začne otáčet.
U této konstrukce je pohyb rotoru možný až poté, co ve statoru vznikne točivé elektromagnetické pole a pokračuje s ním v asynchronním režimu provozu.
Asynchronní motory jsou konstrukčně jednodušší. Proto jsou levnější a široce používané v průmyslových instalacích a domácích spotřebičích.

Motor ABB odolný proti výbuchu
Mnoho pracovních částí průmyslových mechanismů vykonává vratný nebo translační pohyb v jedné rovině, nezbytný pro provoz kovoobráběcích strojů, vozidel, údery kladivem při zarážení pilot.
Přesun takového pracovního tělesa pomocí převodovek, kuličkových šroubů, řemenových pohonů a podobných mechanických zařízení z rotačního elektromotoru komplikuje konstrukci. Moderním technickým řešením tohoto problému je provoz lineárního elektromotoru.
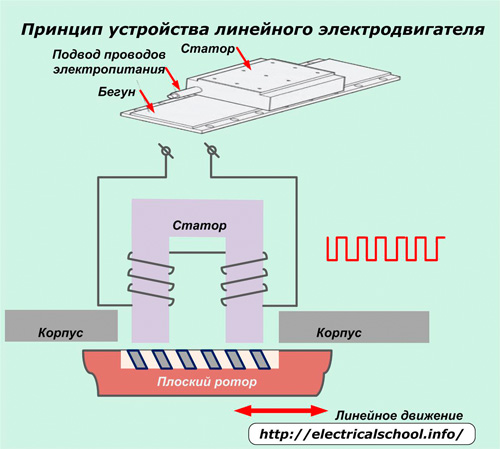
Jeho stator a rotor jsou podlouhlé ve formě pásů a nejsou složeny do prstenců, jako u rotačních elektromotorů.
Princip činnosti spočívá v udělování vratného lineárního pohybu oběžnému rotoru v důsledku přenosu elektromagnetické energie ze stacionárního statoru s otevřeným magnetickým obvodem určité délky. Uvnitř ní se střídavým zapínáním proudu vytváří běžící magnetické pole.
Působí na vinutí kotvy s komutátorem. Síly vznikající v takovém motoru pohybují rotorem pouze v lineárním směru podél vodicích prvků.
Lineární motory jsou navrženy pro provoz na stejnosměrný nebo střídavý proud a mohou pracovat v synchronním nebo asynchronním režimu.
Nevýhody lineárních motorů jsou:
- složitost technologie;
- vysoká cena;
- nízké energetické hladiny.
Telegramový kanál pro ty, kteří se chtějí každý den učit nové a zajímavé věci: Škola pro elektrikáře
Pokud se vám tento článek líbil, sdílejte odkaz na něj na sociálních sítích. Velmi to pomůže rozvoji našeho webu!
Nenechte si ujít aktualizace, přihlaste se k odběru našich sociálních sítí:
Vinutí rotoru se skládá z měděných nebo hliníkových tyčí na koncích zkratovaných dvěma kroužky (klece nakrátko). Statorové vinutí (budící vinutí) je napájeno střídavým proudem ze sítě – vzniká točivé magnetické pole, které indukuje proud ve vinutích rotoru. Na vodiče přenášející proud vinutí rotoru z magnetického pole budícího vinutí působí elektromagnetické síly – vzniká točivý moment, který táhne rotor za magnetickým polem. Frekvence otáčení rotoru nemůže dosáhnout frekvence otáčení magnetického pole statoru (proto se elektromotor nazývá asynchronní), jinak se úhlová rychlost otáčení magnetického pole vzhledem k vinutí rotoru stane nulovou a magnetické pole přestane indukovat EMF ve vinutí rotoru a vytvářet točivý moment.
Indukční motor s fázovým rotorem
Vinutí rotoru je vyvedeno na sběrací kroužky, které se otáčejí s hřídelí stroje. Pomocí kov-grafitových kartáčů klouzajícího po těchto kroužcích je k obvodu vinutí rotoru připojen balastní reostat. Zvýšením odporu reostatu v okamžiku spouštění můžete zvýšit rozběhový moment a snížit rozběhový proud.
Synchronní elektromotory
Statorové vinutí (vinutí kotvy) je napájeno střídavým proudem ze sítě – vzniká točivé magnetické pole. Na rotoru je indukční vinutí spojené se sběracími kroužky. Při startování jsou vinutí rotoru zkratována nebo přes reostat a motor zrychluje v asynchronním režimu. Po dosažení otáček blízkých jmenovitým otáčkám je induktor buzen stejnosměrným proudem – vzniká konstantní magnetické pole, které je v záběru s magnetickým polem statoru a začíná se s ním synchronně otáčet (motor vstupuje do synchronismu).
Provozní režimy asynchronního motoru
Elektromotor přeměňuje elektrickou energii spotřebovanou ze sítě na mechanickou energii.
Asynchronní motor se přepne do režimu generátoru, pokud se rotor začne otáčet rychleji než magnetické pole – na hřídeli se objeví brzdný moment. V tomto režimu elektromotor přeměňuje mechanickou energii na elektrickou a dodává ji do sítě.
Asynchronní motor se přepne do režimu elektromagnetické brzdy, pokud se rotor a magnetické pole statoru otáčí různými směry – na hřídeli se objeví brzdný moment, ale motor nadále spotřebovává elektřinu ze sítě – veškerá spotřebovaná energie je využita k ohřevu motoru.
Způsoby regulace rychlosti otáčení asynchronního motoru
Do obvodu rotoru (motor s vinutým rotorem) se zavádějí další odpory – mechanické vlastnosti motoru se změknou (zhorší se stabilita provozu, zvýší se skluz), sníží se otáčky, zvýší se rozběhový moment a zachová se přetížitelnost.
Nevýhody: velké ztráty na reostatu, skokově se mění otáčky.
Pro tento způsob řízení se používají frekvenční měniče. Pokud při změně frekvence uložte beze změny magnetický tok (a proto musíme udržovat poměr U/f konstantní), pak dostaneme rodinu mechanických charakteristik se stejnou tuhostí a přetížitelností.
Výhody: plynulá regulace, výborné ekonomické vlastnosti, možnost zvýšení frekvence nad 50 Hz (frekvence sítě).
Jak vybrat elektromotor
Vinutí rotoru
- Rotor klece na veverku (klec na veverku)
- Nasouvací rotor: vinutí rotoru je spojeno se sběracími kroužky, které se otáčejí s hřídelí motoru. Pomocí kov-grafitových kartáčů je k okruhu rotoru připojen startovací-regulační reostat. Pomocí tohoto reostatu můžete snížit rozběhový proud a regulovat rychlost otáčení hřídele motoru.
Statorové vinutí, napájecí napětí
Statorové vinutí lze zapojit do hvězdy nebo trojúhelníku.
Pokud je na typovém štítku motoru uvedeno: 220/380, D/Y, to znamená, že motor lze připojit k síti s Uл = 220 V podle obvodu „trojúhelník“ a s Uл = 380 V – podle obvodu „hvězda“.
Pro motory IEC je standardní napětí 230/400 V a pro domácí – 220/380 V.
Standardní velikost
Velikost rámu je vzdálenost v milimetrech „od podlahy“ k ose hřídele motoru. Standardní velikosti domácích motorů (GOST) a dovážených motorů (IEC, NEMA) se obecně neshodují: naše motory jsou nižší než dovážené motory stejného výkonu.
Materiál těla (rámu).
- Hliník
- Litina.
Účinnost
Účinnost η se rovná poměru mechanického výkonu na hřídeli P motoru2 na elektrickou energii odebíranou ze sítě P1.
Výstupní výkon je menší než příkon o množství ztrát.
Třída energetické účinnosti
- EFF1 (vysokoúčinné motory)
- EFF2 (motory s vylepšenou účinností)
- EFF3 (motory s konvenční účinností).
Montážní design
- Nohy (Noha) lité s tělem nebo šroubované
- Příruby (příruba) se zadlabacími otvory (malé příruby) nebo průchozími otvory (velké příruby)
- Kombinované – tlapky a příruba.
Třída ochrany krytu motoru IP
Standardní stupeň krytí elektromotorů je IP55.
Rychlost otáčení
Rychlost otáčení magnetického pole motoru (synchronní rychlost):
n1 = 60f/p [ot./min],
kde p je počet párů pólů motoru,
f je frekvence sítě (50 Hz).
- 2 póly – 3000 ot./min
- 4 póly – 1500 ot./min (standardně)
- 6 pólů – 1000 ot./min
- 8 pólů – 750 ot./min
- 10 pólů – 600 ot./min
- 12 pólů – 500 ot./min.
Rychlost otáčení rotoru asynchronního motoru je menší než rychlost otáčení magnetického pole:
n2 =n1(1 – s),
kde s je skluz.
Vícerychlostní elektromotory jsou motory, u kterých je skoková změna rychlosti realizována přepínáním počtu párů pólů.
Okolní teplota a nadmořská výška
Při instalaci motoru nad 1000 metrů nad mořem a při provozu za zvýšených okolních teplot je nutné počítat se snížením (Derating) výkonu motoru (existují na to speciální tabulky).
Třída tepelné odolnosti izolace
- B – 130 °C
- F – 150 °C (dost pro provoz z frekvenčního měniče)
- H – 180 °C
Jmenovité charakteristiky motoru pro všechny třídy izolace jsou uvedeny pro teplotu chladicí kapaliny +40°C.
Provozní režim
- S1 – trvale: motor běží při ustálené teplotě
- S2 – krátkodobě: motor se nestihne zahřát na stanovenou teplotu, ale během zastavení se stihne úplně vychladit
- S3 – přerušovaný: provoz s konstantní zátěží se střídá s odstávkami, přičemž motor se nestihne ani zahřát, ani zchladit na ustálenou teplotu
- S4 – opakované krátkodobé s dlouhými starty: motor se nestihne zahřát ani zchladit na ustálenou teplotu
- S5 – přerušovaný s dlouhými starty a elektrickým brzděním: motor se nestihne zahřát ani zchladit na ustálenou teplotu
- S6 – přerušovaný: práce s konstantní zátěží se střídá s prací na volnoběh, přičemž se motor nestihne ani zahřát, ani zchladit na ustálenou teplotu
- S7 – přerušovaný s dlouhými starty a brzděním: motor se nestihne zahřát ani vychladit na ustálenou teplotu
- S8 – přerušované s periodickými změnami rychlosti otáčení: motor nemá čas se zahřát ani ochladit na ustálenou teplotu
Tepelná ochrana motoru
- PTC termistory jsou rezistory, jejichž odpor se okamžitě zvýší, když je dosaženo dané teploty. 1 až 3 termistory jsou zapojeny do série pro signalizaci vypínací teploty (Trip), například 155°C. Další řetězec termistoru lze nastavit na signál Alarm, například 145°C.
- PT100 – platinové snímače teploty mají vysokou odolnost proti oxidaci a vysokou přesnost měření. PT100 se připojují pomocí 2, 3 nebo 4vodičového obvodu (čím více vodičů, tím méně rušení).
Do vinutí statoru lze instalovat 3 až 6 snímačů PT100.
Další 2 snímače PT100 lze použít pro měření teplot ložisek. - KTY jsou křemíkové tepelné senzory s kladným koeficientem odporu, vyznačující se vysokou linearitou, vysokým výkonem, spolehlivým polovodičovým designem a nízkou cenou.
Servisní faktor
Motor s provozním faktorem 1.1 může nepřetržitě pracovat s přetížením 10 % jmenovitého výstupního momentu.
Třída točivého momentu
Třída momentu ukazuje násobek rozběhového momentu (s přímým startem ze sítě) při napětí sníženém o 5 %:
- Třída 16 – 160 %
- Třída 13 – 130 %
- Třída 10 – 100 %
- Třída 7 – 70 %
- Třída 5 – 50 %
Účiník cos φ
Účiník (cos φ) se rovná poměru činného výkonu spotřebovaného motorem k celkovému výkonu.
Aktivní síla se vynakládá na užitečnou práci.
Zdánlivý výkon se rovná geometrickému součtu činného a jalového výkonu.
Jalový výkon se vynakládá na magnetizaci motoru.
Antikondenzační topení
Existují dva způsoby, jak vysušit vinutí před spuštěním motoru ve vlhké místnosti:
- Použijte motor se speciálním vestavěným topením
- Na jedno vinutí statoru přiveďte napětí 4 až 10 % jmenovité hodnoty (pro průchod proudu 20 až 30 % jmenovité hodnoty), které stačí k odpaření kondenzátu (neplatí pro všechny motory). Některé frekvenční měniče to umí.
Chlazení
- Povrchové chlazení (bez ventilace: bez ventilátoru)
- Vlastní ventilace: ventilátor na hřídeli motoru
- Nucené chlazení (nezávislý ventilátor nebo kapalinové chlazení vodou nebo olejem)
U turbo mechanismů (ventilátory a čerpadla, u kterých je kroutící moment na hřídeli úměrný druhé mocnině otáček) většinou postačí vlastní odvětrání.
Motory, které pracují z frekvenčních měničů s konstantním momentem po dlouhou dobu při nízkých otáčkách, musí být buď předimenzovány, nebo opatřeny nuceným chlazením.
Fan
- Plastický
- Kovové
- Kov se zvýšeným momentem setrvačnosti
Požadavky na motor při provozu z frekvenčního měniče
- Teplotní třída izolace není nižší než F
- Možnost nuceného větrání (viz výše)
- Izolované ložisko na nepracovní straně hřídele (doporučeno pro velikosti 225 a vyšší)
Ložiska
Při provozu z frekvenčního měniče při frekvencích nad 50 Hz se snižuje životnost ložisek.
Některé motory mají na pracovní straně hřídele nainstalované plovoucí ložisko a na nepracovní straně pevné ložisko (Located bearing). U ostatních je to naopak (například pro spojení s převodovkou).
Ložiska jsou standardně odpružena v axiálním směru (podél hřídele), aby byl zajištěn rovnoměrný chod motoru. Motory s ložisky s kosoúhlým stykem takovou pružinu nemají, takže radiální síla (kolmo na hřídel – např. od řemene) musí působit neustále, jinak ložisko rychle selže.
Tuk
U motorů s velikostí rámu do 250 pracujících ve jmenovitém režimu je mazivo zpravidla dimenzováno na celou životnost ložisek.
Pro doplnění maziva musí mít motor speciální vsuvku.
Hřídel motoru
Motor může mít druhý konec hřídele motoru, který může přenášet jak jmenovitý, tak menší točivý moment.
Druhý konec hřídele je nekompatibilní s volitelnými doplňky, jako je snímač rychlosti a nucený chladicí ventilátor a případně také brzda.
Brzda
Při výběru brzdy je třeba vzít v úvahu:
- Typ:
- statické (přídržná brzda se aktivuje pouze tehdy, když hřídel stojí)
- dynamický (můžete upravit brzdný moment, menší opotřebení v případě nouzového brzdění)
Snímač rychlosti
Snímač rychlosti může být umístěn hermeticky uvnitř pouzdra (zapouzdřený) nebo vně pod ochranným krytem.